Below is a selection of some personal projects and non-NDA-protected work projects I have contributed to over the past few years.
The PokerPro

The PokerPro is a fully 3D-printed and laser-cut, semi-automated poker-dealing robot. With minimal user input, the system is capable of identifying players, shuffling, flipping, and dealing cards, as well as recognizing hands to automatically determine the winner.
This was a University group project in which I was responsible for ideating and designing a card-flipping mechanism and a rugged rotation mechanism, as well as programming functions to flip and distribute cards, identify when players fold, and advance the game as required.
Part Pallet

At ATS, I was responsible for ideating, designing and testing a pallet concept for unique customer parts, where accelerations upwards of 3 g (30,000 mm/s²) needed to be tolerated. This project was particularly challenging due to the irregular shape of the parts, which provided no surfaces suitable for clamping. By incorporating a high-friction pallet material and applying extremely tight tolerances, the parts were successfully indexed.

Vacuum Pick Tool
Another project I worked on at ATS involved conceptualizing, designing, and testing a vacuum pick tool for the same unique customer part that the pallet was made for. The pick tool locates the part using dowels in combination with the part's surface profile. This approach minimizes local pressures on the part by using optimized pathways, while maximizing surface areas to avoid damaging or rupturing the customer part. Testing confirmed that this method of locating and picking did not cause damage or rupture the part.

The Spin N' Shoot

The Spin N’ Shoot is another university group project I worked on. It is a Ferris wheel–style rotating target game featuring five targets that must be hit within a 30-second time limit. The game increases in difficulty based on user performance and progression.
My role in this project consisted of building the frame, integrating a slip ring, motor driver, Arduino, stepper motor and a breadboard into the hardware system to allow for tangle-free rotation and an improved user experience. I also programmed the project using the Arduino language.
Pick and Place Tooling

Another project I worked on with ATS involved designing, validating, and sizing pick-and-place (PnP) tooling. Using SolidWorks Motion Analysis, I developed optimal motion profiles to ensure the customer parts experienced minimal acceleration during movement. Once the profiles were established, I sized the actuators based on the maximum stroke lengths and payload requirements. With the actuators defined, I then used Rockwell Motion Analyzer to properly size all associated motors and gearboxes.
Crowder Tooling

For this project, I updated an existing cell layout to incorporate the crowder tooling seen in the bottom left corner of the screen for precise part picks. The crowder is driven by a single servo motor, with its rotary motion translated into two opposing linear motions through the yellow connector block and the guide rails shown above. This design allows the crowder to open and close quickly while minimizing tooling cost and footprint. I also developed several motion profiles and animations to more effectively demonstrate the concept to those not involved in the original design.
Individually Rotating Gantry
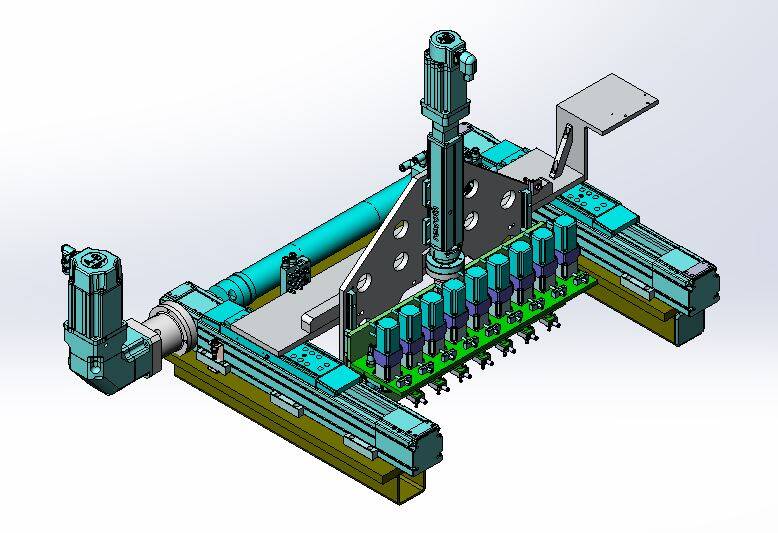
This design came with a set of unique requirements. The gantry needed the ability to individually rotate parts during transfer, as their orientations could not be predicted before entering the cell. This posed a challenge since the parts were spaced at very small intervals of approximately 50 mm, requiring the rotation mechanism to be both lightweight and compact. As shown above, nine separate servo motors were used in this application. The first iteration involved staggered timing belts to drive rotation; however, during the second iteration, it was determined that the mechanism could be achieved at an even smaller pitch, meaning the staggering was unnecessary.
System Layouts & PnPs

During my most recent work term, I contributed to several large projects, including the creation of multiple system layouts. The image above shows one of the more complex projects. For this project, I helped conceptualize and design five separate PnP systems, four of which are highlighted in color in the image. I am particularly proud of the system in the bottom left corner, where parts are rotated from horizontal to vertical at a rate of approximately 600 PPM. Due to the significant vertical offset and tight time constraints, a radial PnP mechanism was determined to be the most effective solution for the transfer.